
בנושא הקודם" סיווג מנועים חשמליים" ;, הסברתי את הסוגים השונים של מנוע DC מוברש (BDC) שכמו בתרשים הבא:

היום אסביר את מנוע ה- DC ללא מברשות (BLDC) ואת מנועי האינדוקציה של AC.
אתה יכול לסקור את הנושאים הקשורים הבאים לבדיקה ולמעקב טוב.
מנועי חשמל רכיבים בסיסיים
2- מנועי DC ללא מברשת
|
מנועי DC ללא מברשות |

במנועי DC מברשות, הממיר המכני והמברשות הנלוות לכך הן בעייתיות מכמה סיבות כדלקמן:
שחיקת מברשות מתרחשת, והיא גדלה באופן דרמטי בסביבה בלחץ נמוך.
ניצוצות מהמברשות עלולות לגרום לפיצוצים אם הסביבה מכילה חומרי נפץ.
רעש RF מהמברשות עלול להפריע למכשירי טלוויזיה בקרבת מקום, או מכשירים אלקטרוניים וכו '.
מנועי זרם ישיר ללא מברשות (BLDC) הם אחד מסוגי המנועים שצוברים פופולריות במהירות. מנועי BLDC משמשים בתעשיות כגון מכשירי חשמל, רכב, תעופה וחלל, צרכנות, רפואה, ציוד אוטומציה תעשייתי ומכשור.
כפי שהשם מרמז, מנועי BLDC אינם משתמשים במברשות להנעה; במקום זאת, הם מנותבים אלקטרונית.
למנועי BLDC יתרונות רבים על פני מנועי DC מוברשים ומנועי אינדוקציה, כמה מהם הם:
מהירות טובה יותר מול מאפייני מומנט.
תגובה דינאמית גבוהה.
יעילות גבוהה.
חיי פעולה ארוכים.
פעולה ללא רעש.
טווחי מהירות גבוהים יותר.
בנוסף, יחס המומנט המועבר לגודל המנוע גבוה יותר, מה שהופך אותו שימושי ביישומים בהם שטח ומשקל הם גורמים קריטיים.
בְּנִיָה
מנועי BLDC הם סוג של מנוע סינכרוני. המשמעות היא שהשדה המגנטי שנוצר על ידי הסטאטור והשדה המגנטי שנוצר על ידי הרוטור מסתובבים באותה תדר.
מנועי BLDC מגיעים בתצורות חד פאזיות, דו פאזיות ו -3 פאזיות. בהתאם לסוגו, יש לסטטור אותו מספר פיתולים. מתוך אלה, מנועים תלת פאזיים הם הפופולריים ביותר והנמצאים בשימוש נרחב.
1- סטאטור
|
סטאטור של מנוע BLDC |

סטאטור של מנוע BLDC מורכב מרבדות פלדה מוערמות עם פיתולים הממוקמים בחריצים החתוכים באופן צירי לאורך הפריפריה הפנימית.
לרוב מנועי BLDC יש שלושה סלילי סטאטור המחוברים בצורה כוכבית. כל אחת מפיתולים אלה בנויה עם סלילים רבים המחוברים זה לזה ליצירת סלילה. סליל אחד או יותר מונחים בחריצים והם מחוברים זה לזה כדי ליצור סלילה. כל אחת מהפיתולים הללו מופצת על פני הפריפריה של הסטאטור ליצירת מספר זוגי של קטבים.
בהתאם ליכולת אספקת החשמל הבקרה, ניתן לבחור את המנוע בעל דירוג המתח הנכון של הסטאטור. 48 מנועים או פחות מדורגי מתח משמשים ברכב, ברובוטיקה, בתנועות זרועות קטנות וכן הלאה. מנועים בעלי 100 וולט או דירוג גבוה יותר, משמשים במכשירי חשמל, אוטומציה ויישומים תעשייתיים.
2- רוטור
|
הרוטור של מנוע BLDC |

הרוטור עשוי מגנט קבוע ויכול להשתנות משניים לשמונה זוגות מוטות עם קטבים חלופיים צפון (N) ודרום (S).
|
תנוחות מגנט רוטור BLDC |
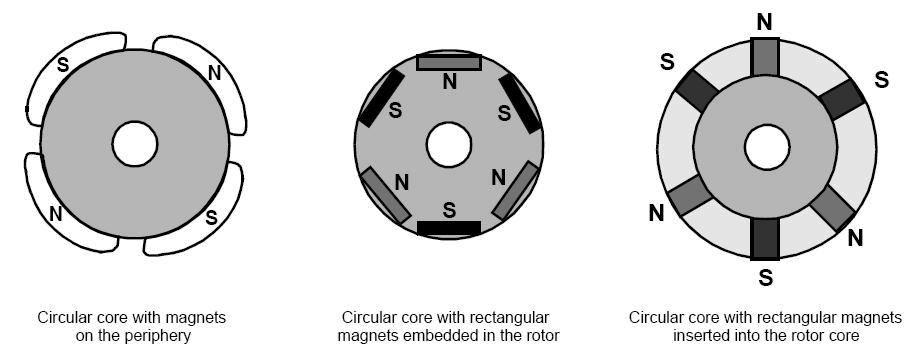
בהתבסס על צפיפות השדה המגנטי הנדרש ברוטור, נבחר החומר המגנטי המתאים לייצור הרוטור. מגנטים של פריט משמשים באופן מסורתי לייצור מגנטים קבועים.
3- חיישני אולם
|
חיישני אולם BLDC |
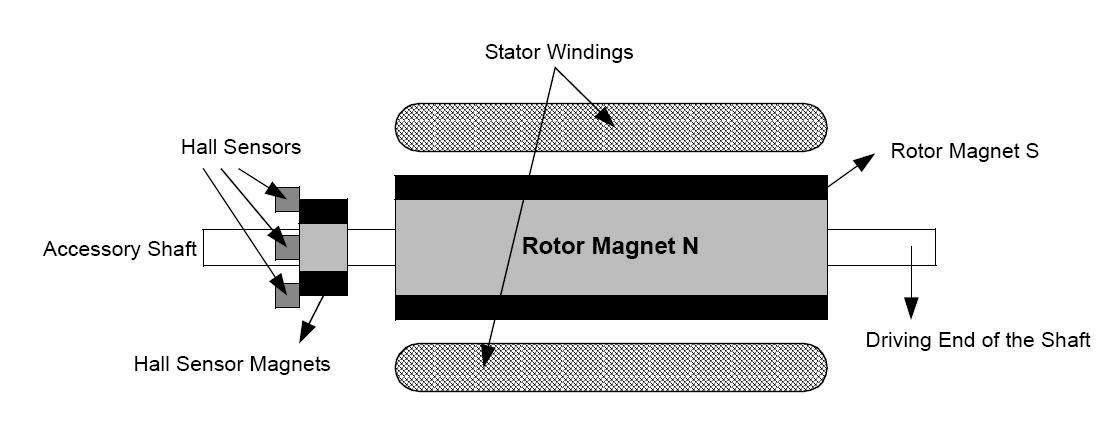
שלא כמו מנוע DC מוברש, התמורה של מנוע BLDC נשלטת באופן אלקטרוני. כדי לסובב את מנוע ה- BLDC, יש להפעיל את פיתולי הסטטור ברצף. חשוב להכיר את מיקום הרוטור כדי להבין איזו סלילה תופעל בעקבות הרצף הממריץ. מיקום הרוטור מורגש באמצעות חיישני Hall Effect המוטבעים בסטאטור.
לרוב מנועי BLDC יש שלושה חיישני הול המשובצים בסטאטור בקצה המנוע שאינו מניע אותו.
בכל פעם שהקטבים המגנטיים של הרוטור עוברים ליד חיישני האולם, הם נותנים אות גבוה או נמוך, המצביע על כך שהקוטב N או S עובר ליד החיישנים. בהתבסס על השילוב של שלושת אותות חיישן ההול הללו, ניתן לקבוע את רצף ההנחה המדויק.
בהתבסס על המיקום הפיזי של חיישני האולם, ישנן שתי גרסאות של פלט. חיישני האולם עשויים להיות בשינוי פאזה של 60 ° או 120 ° זה לזה. על סמך זה, יצרן המנועים מגדיר את רצף ההסבה, שיש לעקוב אחריו בעת שליטה על המנוע.
הערה: חיישני האולם דורשים ספק כוח. המתח עשוי לנוע בין 4 וולט ל 24 וולט. הזרם הנדרש יכול לנוע בין 5 ל -15 חזרות.
תורת המבצע
לכל רצף התניידות יש אחד מהפיתולים המופעלים לכוח חיובי (זרם נכנס לפתילה), הסלילה השנייה היא שלילית (הזרם יוצא מהפיתול) והשלישי במצב שאינו מופעל.
מומנט נוצר בגלל האינטראקציה בין השדה המגנטי שנוצר על ידי סלילי הסטאטור לבין המגנטים הקבועים של הרוטור.
כדי להשאיר את המנוע פועל, השדה המגנטי המיוצר על ידי הפיתולים צריך לשנות את המיקום, כאשר הרוטור זז כדי להדביק את שדה הסטאטור. מה שמכונה "שיטת שישה שלבים" מגדיר את רצף האנרגיה של הפיתולים.
בהנחה של שישה שלבים, משתמשים רק בכל פעם בשניים מתוך שלושת פיתולי מנוע ה- DC ללא מברשת. צעדים שווים ל -60 מעלות חשמל, כך שש שישה שלבים מבצעים סיבוב מלא של 360 מעלות. לולאה אחת מלאה של 360 מעלות יכולה לשלוט בזרם מכיוון שיש רק נתיב זרם אחד. שיטת שידור של שישה שלבים שימושית בדרך כלל ביישומים הדורשים תדירות מהירות ותנועה. מנוע DC ללא מברשות בעל שישה שלבים בדרך כלל בעל יעילות מומנט נמוכה יותר מאשר מנוע ממונח גל סינוס.
יישומי מנוע BLDC אופייניים
אנו יכולים לסווג את סוג בקרת המנוע BLDC לשלושה סוגים עיקריים:
עומס קבוע.
עומסים משתנים.
מיקום אפליקציות.
1- יישומים עם עומסים קבועים:
אלה סוגי היישומים שבהם מהירות משתנה חשובה יותר מאשר שמירה על דיוק המהירות במהירות שנקבעה. בנוסף, קצבי ההאצה והאטה אינם משתנים באופן דינמי. בסוגי יישומים אלה העומס מצורף ישירות לציר המנוע.
לדוגמה, מאווררים, משאבות ומפוחים נופלים תחת יישומים מסוג זה. יישומים אלה דורשים בקרי בעלות נמוכה, הפועלים בעיקר בלולאה פתוחה.
2- יישומים עם עומסים משתנים:
אלה סוגי היישומים בהם העומס על המנוע משתנה בטווח מהירות. יישומים אלה עשויים לדרוש דיוק שליטה במהירות גבוהה ותגובות דינאמיות טובות.
לדוגמה,
מכשירי חשמל לבית: מכונות כביסה, מייבשים ומדחסים.
ברכב, בקרת משאבת דלק, בקרת היגוי אלקטרונית, בקרת מנוע ובקרת רכב חשמלי.
בחלל, ישנם מספר יישומים, כמו צנטריפוגות, משאבות, בקרות זרוע רובוטיות, פקדי ג'ירוסקופ וכו '.
יישומים אלה עשויים להשתמש בהתקני משוב מהירות ועשויים לפעול בלולאה סגורה למחצה או בלולאה סגורה כוללת.
3- יישומי מיקום:
רוב סוגי היישומים התעשייתיים והאוטומטיים נכללים בקטגוריה זו. ליישומים בקטגוריה זו יש סוג של העברת כוח, שיכולה להיות הילוכים מכניים או חגורות טיימר, או מערכת פשוטה מונעת חגורה. ביישומים אלה, התגובה הדינמית של מהירות ומומנט חשובה. כמו כן, ליישומים אלה עשויה להיות היפוך תכוף של כיוון הסיבוב.
מערכות אלה פועלות לרוב בלולאה סגורה.
לבסוף, השוואה בין מנוע DC מוברש (BDC) לבין מנוע DC ללא מברשות (BLDC) היא כפי שמוצג בתמונה למטה.

שנית: AC מוטורס
מנועי זרם חילופין (AC) משתמשים בזרם חשמלי, אשר הופך את כיוונו במרווחי זמן קבועים.
היתרון העיקרי של מנועי DC על פני מנועי AC הוא שהקשה יותר לשלוט על מנועי AC. כדי לפצות על כך, מנועי AC יכולים להיות מצוידים בכונני תדרים משתנים אך בקרת המהירות המשופרת באה יחד עם איכות הספק מופחתת.
סוגי מנועי AC:

מנועי AC בשימוש נפוץ כיום יכולים להיות מחולקים לשתי קטגוריות רחבות:
מנועים אינדוקציה (אסינכרוני).
מנועים סינכרוניים.
מנועים ליניאריים.
שני סוגי מנועים אלה נבדלים באופן שבו מסופק עירור שדה הרוטור כדלקמן:
עבור מנועי אינדוקציה, אין עירור רוטור המופעל חיצונית, ובמקום זאת זרם נגרם לתוך פיתולי הרוטור עקב השדה המגנטי המסתובב של הסטטור.
עבור מנועים סינכרוניים, עירור שדה מוחל על פיתולי הרוטור. הבדל זה בעירור השדה מוביל להבדלים במאפייני המנוע, מה שמוביל בתורו לדרישות הגנה ושליטה שונות לכל סוג מנוע.
1- מנוע אינדוקציה
מנועי אינדוקציה הם המנועים הנפוצים ביותר המשמשים לציוד שונים בתעשייה.
מנוע אינדוקציה: מה שנקרא מכיוון שהמתח נגרם ברוטור (ולכן אין צורך במברשות), אך כדי שזה יקרה, הרוטור מאשר הרוטור חייב במהירות נמוכה יותר את השדה המגנטי כדי לאפשר קיומו של מתח המושרה.
לכן יש צורך במונח חדש לתיאור מנוע האינדוקציה שהוא החלקה.
התלוש:
מומנט נהיגה יכול להתקיים רק אם יש זרם המושרה בטבעת ההצללה. הוא נקבע על ידי הזרם בזירה והוא יכול להתקיים רק אם יש וריאציה שטף בזירה. לכן חייב להיות הבדל במהירות בטבעת ההצללה ובשדה המסתובב. זו הסיבה שמנוע חשמלי הפועל לפי העיקרון שתואר לעיל נקרא "מנוע אסינכרוני".
ההבדל בין המהירות הסינכרונית (Ns) לבין מהירות הצללת הצללה (N) נקרא "החלקה" (ים) ומתבטא באחוזים מהמהירות הסינכרונית.
S=(Nsyn - Nm)/ Nsyn
איפה ההחלקה? החלקה היא אחד המשתנים החשובים ביותר בבקרה ותפעול של מכונות אינדוקציה.
s=0: אם הרוטור פועל במהירות סינכרונית.
s=1: אם הרוטור נייח.
s הוא –ve: אם הרוטור פועל במהירות מעל המהירות הסינכרונית.
s הוא + ve: אם הרוטור פועל במהירות מתחת למהירות הסינכרונית.
יתרונות:
עיצוב פשוט, מחוספס, מחיר נמוך, תחזוקה קלה.
מגוון דירוגי הספק: כוח סוס חלקי עד 10 מגה -וואט.
הפעל בעיקרו במהירות קבועה מעומס ללא עומס מלא.
מהירותו תלויה בתדירות מקור הכוח.
המנוע הפופולרי ביותר כיום בטווח הסוס הנמוך והבינוני.
מאוד חזק בבנייה.
החלפת מנועי DC באזורים בהם לא ניתן להשתמש במנועי DC מסורתיים כגון כרייה או סביבות נפץ משני סוגים בהתאם לבניית המנוע; כלוב סנאים או טבעת החלקה.
חסרונות:
לא קל לקבל בקרת מהירות משתנה.
דורש כונן אלקטרוני בתדר משתנה לבקרת מהירות אופטימלית.
רובם פועלים עם גורם כוח מפגר.
עקרון הפעולה:
הסטאטור מחובר בדרך כלל לרשת, ולכן הסטטור ממוגנט.
השדה המגנטי של הסטאטור חותך את פיתולי הרוטור ומייצר מתח המושרה בפיתולי הרוטור.
מכיוון שפיתולי הרוטור מקצרים, הן לכלוב סנאים והן לרוטור פצעים, וזרימת זרם המושרה בפיתולי הרוטור.
זרם הרוטור מייצר שדה מגנטי נוסף.
מומנט נוצר כתוצאה מאינטראקציה של שני השדות המגנטיים.
בְּנִיָה:
מנוע אינדוקציה כולל שני חלקים עיקריים
1- סטאטור
|
סטאטור מנוע אינדוקציה |

זהו החלק הבלתי נייד של המנוע. גוף בברזל יצוק או סגסוגת קלה מכיל טבעת של לוחות פלדה סיליקון דקים (בעובי של 0.5 מ"מ בערך). הלוחות מבודדים זה מזה על ידי חמצון או לכה מבודדת. "למינציה" של המעגל המגנטי מפחיתה הפסדים כתוצאה מהיסטריזה וזרמי מערבולת.
ללוחות יש חריצים עבור פיתולי הסטאטור שייצרו את התאמת השדה המסתובב (שלוש פיתולים עבור מנוע תלת פאזי). כל סלילה מורכבת מכמה סלילים. אופן חיבור הסלילים קובע את מספר זוגות הקטבים במנוע ומכאן את מהירות הסיבוב.
2- רוטור
זהו החלק הנייד של המנוע. בדומה למעגל המגנטי של הסטאטור, הוא מורכב מלוחות מוערמות המבודדות זו מזו ויוצרות גליל המונע לציר המנוע.
סוגי מנועי אינדוקציה
|
סוגי מנועי אינדוקציה |

מנועי אינדוקציה מסווגים לפי סוג הרוטור כדלקמן:
רוטור כלוב סנאי:

|
רוטור סנאי-כלוב |

הוא מורכב ממוטות מוליכים עבים המוטבעים בחריצים מקבילים. סורגים אלה קצרים בשני קצותיהם באמצעות טבעות קצרות.
רוטור פצע:

|
רוטור פצע |

יש לו תלת פאזי, שכבה כפולה, מפותלת. הוא פצוע לקטבים רבים כמו הסטטור. שלושת השלבים מחוברים פנימית והקצוות האחרים מחוברים לטבעות החלקה המותקנות על פיר כשמברשות מונחות עליהם.
כל אחד משני סוגי מנועי האינדוקציה לעיל ניתן לסווג לשתי קבוצות עיקריות כדלקמן:
I- מנועי אינדוקציה חד פאזיים:
לאלה יש רק מתפתל סטאטור אחד, פועלים עם ספק כוח חד פאזי, יש להם רוטור כלוב סנאים, ודורשים מכשיר כדי להניע את המנוע. זהו ללא ספק המנוע הנפוץ ביותר המשמש במכשירי חשמל ביתיים, כגון מאווררים, מכונות כביסה ומייבשי בגדים, וליישומים של עד 3 עד 4 כוחות סוס.
מנועי אינדוקציה חד פאזיים מגיעים גם עם רוטור פצעים בעל מאפייני התחלה ותאוצה מצוינים, והם אידיאליים למפעילי ערך, יישומי מנועים חקלאיים, מנופים, מכונות תחזוקה לרצפה, מדחסי אוויר, ציוד כביסה וציוד כרייה.
II- מנועי אינדוקציה תלת פאזיים:
השדה המגנטי המסתובב מיוצר על ידי אספקה תלת פאזית מאוזנת. מנועים אלה בעלי יכולות הספק גבוהות, יכולים לכלול סנאים או רוטורים פצעים (אם כי ל -90% יש רוטור כלוב סנאי), והם מתחילים את עצמם. ההערכה היא שכ- 70% מהמנועים בתעשייה הם מסוג זה, משמשים למשל במשאבות, מדחסים, מסוע, רשתות חשמל כבדות וטוחנים. הם זמינים בדירוג של 1/3 עד מאות כוחות סוס.
כעת, הבה נראה את הסיווג הראשון של מנועי אינדוקציה המבוסס על הסוגים הנ"ל:
1- שלב אחד, כלוב סנאים, מנוע אינדוקציה:
לקטגוריה זו סוגים רבים כפי שמוצג בתמונה למטה.

מנועי אינדוקציה של A-Shaded-Pole
עקרון הבנייה והתפעול:
|
מנועי אינדוקציה על הקוטב |

מנועים בעלי מוט מוצל יש רק סלילה ראשית אחת ואין התחלת סלילה. התחלה היא שימוש בעיצוב המצלצל לולאת נחושת רציפה סביב חלק קטן מכל אחד ממוטבי המנוע. זה "מסווה" את החלק הזה של הקוטב, וגורם לשדה המגנטי באזור המוצל לפגר מאחורי השדה באזור הלא מוצל. התגובה של שני השדות גורמת לפיר להסתובב.
יתרונות:
מכיוון שלמנוע הקוטב המוצל אין התפתלות, מתג התחלה או קבלים, הוא פשוט וזול מבחינה חשמלית.
ניתן לשלוט על המהירות אך ורק על ידי מתח משתנה, או באמצעות פיתול רב-ברז.
מבחינה מכנית, בניית המנועים המוצלים במוט מאפשרת ייצור בנפח גבוה.
בדרך כלל אלה נחשבים מנועים "חד פעמיים", כלומר הרבה יותר זול להחליף אותם מאשר לתקן אותם.
חסרונות:
מומנט ההתחלה הנמוך שלו הוא בדרך כלל 25% עד 75% מהמומנט המדורג.
זהו מנוע החלקה גבוה עם מהירות ריצה של 7% עד 10% מתחת למהירות הסינכרונית.
באופן כללי, היעילות של סוג מנוע זה נמוכה מאוד (מתחת ל -20%).
יישומים:
העלות ההתחלתית הנמוכה מתאימה למנועי מוט המוצל ליישומי כוח סוס או יישומים קלים. אולי השימוש הגדול ביותר שלהם הוא במאווררים מרובי מהירות לשימוש ביתי. אבל המומנט הנמוך, היעילות הנמוכה והתכונות המכניות החסרות פחות הופכים את מנועי המוצלים למוט ללא מעשיים לרוב השימוש התעשייתי או המסחרי, כאשר קצבי מחזור גבוהים יותר או עבודה רציפה הם הנורמות.
בנושא הבא, אמשיך להסביר סוגים אחרים של מנוע אינדוקציה של כלבים חד פאזיים, כלוב סנאים, אז אנא המשך לעקוב.





